Benoît Morgan
Research and teaching in information system security
Research
Teaching resources
TLS-SEC Trainings
ACADIE team @ IRIT
INP-ENSEEIHT University
Motivation
Abyme legacy hypervisor bare-metal hypervisor development. Regarding Abyme legacy boot process, it is loaded as a multiboot module by syslinux bootloader and then loaded by our ELF64 loader as depicted in the next figure.
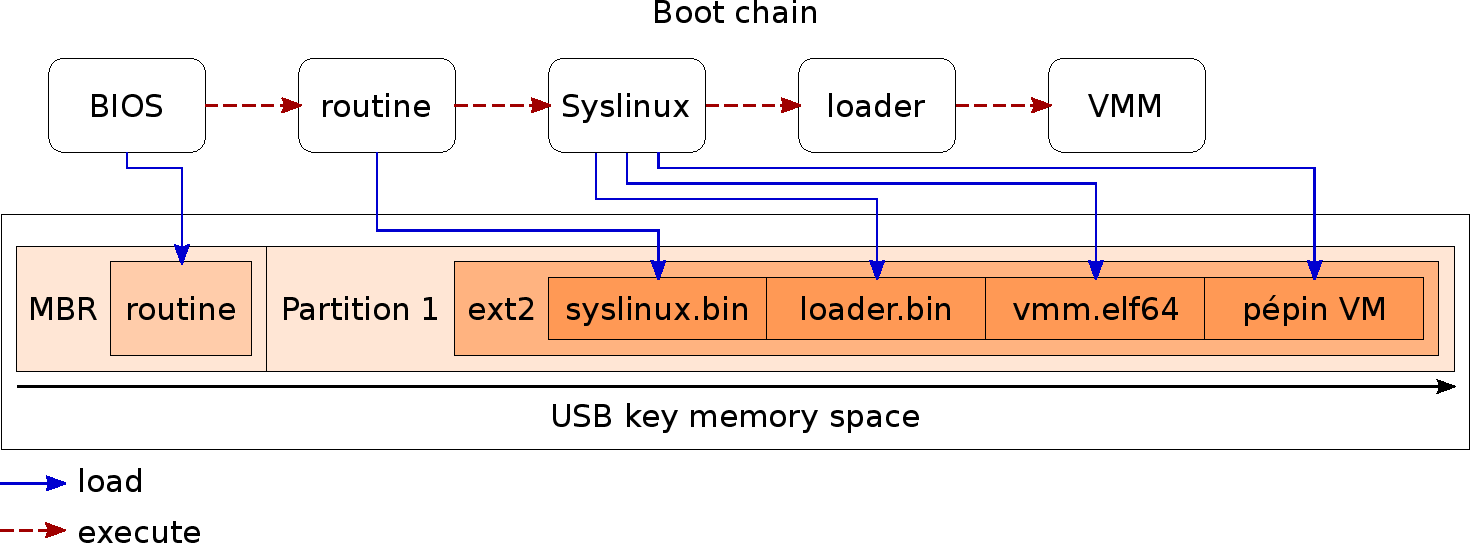
In a regular boot chain, syslinux is only executed once, and normally to load the operating system. In our case, we load our loader and hypervisor instead and cannont benefit from syslinux anymore to decompress and loader kernel and ramdisks.
In order to avoid the development of a complex loader, we execute a very simple
real mode program into the VM (Pépin VM). Its only task is to soft reboot the
system using BIOS interruption int $0x19.
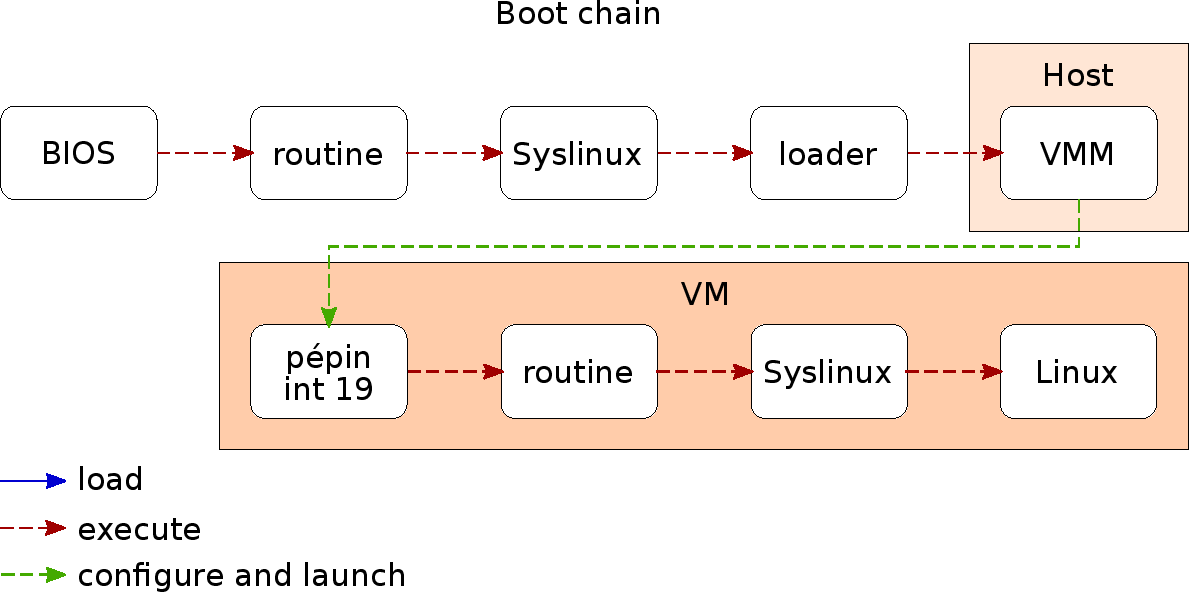
This strategy worked like a charm until we came out to use a UEFI firware
supporting BIOS legacy mode (2013). On this new machine, reboot using int
$0x19 seems not to be reentrant and gets stuck at some point.
I succeeded to understand the issue using the following hook strategy.
Hooking real mode bios to debug the firmware
Here is an example of a VM kernel hooking the bios. I will illustrate it using
int 0x13 which is used to read disk sectors.
sources/rm_kernels/rm_int13/kernel.c
__asm__ __volatile__(".code16gcc\n");
int __NORETURN main(void) {
screen_clear();
printk("Time to own the bios...\n");
run_protected(&own_bios, 0xf831f);
printk("Bios owned\n:))\n");
// Sector read
uint8_t sector[512]; // The sector data
if (read_first_sector(sector)) {
printk("FAILED\n");
} else {
printk("SUCCESS\n");
}
while (1);
}The preceding code install a hook a the bios address pointed by the real
Interruption Vector Table entry 0x15 : 0xf000:831f, which is interpreted as
0xf831f in protected mode. Then it calls read_first_sector() function to get
the first sector using int $0x13 bios service.
The job of this hook is to call a user defined real mode function which gets core context as a parameter when the hook has been executed.
sources/rm_kernels/rm_int13/kernel.c
void hook_bios(struct core_gpr *gpr) {
screen_clear();
printk("hook bios\n");
dump_core_state(gpr);
}The hook is installed using run_protected(fun, arg) function. This function is
a trampoline from real mode to protected mode. It sets the processor in
protected mode using a local GDT, executes fun(arg) and rolls back to real
mode before returning to the caller. In our case, fun is the address of
own_bios function.
To go back and forth real mode, we need some protected mode and real mode GDTs.
sources/rm_kernels/common_16/own_bios.s
/*
* Descriptors.
*/
.macro GDT_ENTRY_16 type, base, limit
.word (((\limit) >> 12) & 0xffff)
.word (((\base) >> 0) & 0xffff)
.byte (0x00 + (((\base) >> 16) & 0xff))
.byte (0x90 + (((\type) >> 0) & 0x6f))
.byte (0x80 + (((\limit) >> 28) & 0x0f))
.byte (0x00 + (((\base) >> 24) & 0xff))
.endm
.macro GDT_ENTRY_32 type, base, limit
.word (((\limit) >> 12) & 0xffff)
.word (((\base) >> 0) & 0xffff)
.byte (0x00 + (((\base) >> 16) & 0xff))
.byte (0x90 + (((\type) >> 0) & 0x6f))
.byte (0xC0 + (((\limit) >> 28) & 0x0f))
.byte (0x00 + (((\base) >> 24) & 0xff))
.endm
gdt:
GDT_ENTRY_32 0x0, 0x0, 0x00000000
GDT_ENTRY_32 0x8 /* SEG X */ + 0x2 /* SEG R */, 0x0, 0xffffffff
GDT_ENTRY_32 0x2 /* SEG W */, 0x0, 0xffffffff
GDT_ENTRY_16 0x8 /* SEG X */ + 0x2 /* SEG R */, 0x0, 0xffffffff
GDT_ENTRY_16 0x2 /* SEG W */, 0x0, 0xffffffff
gdt_end:
/*
* loaded using lgdtr
*/
gdtr:
.word gdt_end - gdt - 1
.long gdtWe require XR protected and real segments for %cs we also require W
protected and real segments for %ds and others.
sources/rm_kernels/common_16/own_bios.s
/**
* Runs the arg0 function in protected mode
* with arg1 argument
* Saves the caller segmentation config
*/
.code16
run_protected:
push %ebp
mov %esp, %ebp
cli
// We need a new gdt when we are with abyme
// (test without failed : triple faulted)
// Register our gtd
lgdt gdtr
// Go into the protected mode
mov %cr0, %eax
or $0x1, %al
mov %eax, %cr0
// Save the segmentation state
push %ss
push %cs
push %ds
push %es
push %fs
push %gs
// Select the good segments for the gdt
ljmp $0x08, $next
.code32
next:
mov $0x10, %ax
mov %ax, %ds
mov %ax, %es
mov %ax, %fs
mov %ax, %gs
mov %ax, %ss
// Calls the protected function
// first parameter : address
mov 8(%ebp), %eax
// second parameter : parameter
mov 12(%ebp), %ebx
push %ebx
call *%eax
// Free memory
add $0x4, %esp
// Restore 16 bits segments
mov $0x20, %ax
mov %ax, %ds
mov %ax, %es
mov %ax, %fs
mov %ax, %gs
mov %ax, %ss
ljmp $0x18, $end
.code16
end:
// Go back to real mode dudes
mov %cr0, %eax
and $0xfffffffe, %ax
mov %eax, %cr0
// Restore caller segmentation
pop %gs
pop %fs
pop %es
pop %ds
// pop %cs
pop %ax
pop %ss
// Create the seg:offset address for the long jump
// push %cs
push %ax
push $very_end
ljmp *(%esp)
.code16
very_end:
pop %eax
mov %ebp, %esp
pop %ebp
sti
retlThe previous listing allows to execute arbitraty protected mode function with
one argument. We can execute run_protected(&own_bios, 0xf831f) from real
mode for instance as in our kernel. own_bios() run in protected mode because
it needs to access to MMIO registers in order to remap the firmware from flash
to RAM in order to modify it (hook it).
Lets move on to the hooking process.
sources/rm_kernels/common_16/own_bios.s
.code32
own_bios:
push %ebp
mov %esp, %ebp
/* unprotect the BIOS memory */
// XXX Unprotecting the bios memory
// Copying the BIOS flash in ram
// See Intel 3rd generation core PAM0-PAM6
movb $0x30, 0xf8000080
movb $0x33, 0xf8000081
movb $0x33, 0xf8000082
movb $0x00, 0xf80f80d8
/**
* Get the first parameter
* It is used to locate where to install
* the bios hang
*/
mov 8(%ebp), %eax
mov %eax, handler_address
// Save the handler
cld
mov handler_address, %esi
mov $handler_save, %edi
mov $(bioshang_end - bioshang_start), %ecx
rep movsb
// Own the handler
cld
mov $bioshang_start, %esi
mov handler_address, %edi
mov $(bioshang_end - bioshang_start), %ecx
rep movsb
mov %ebp, %esp
pop %ebp
retThis piece of code does the following :
- Migrates firmware code in RAM but preserves the same physical location in memory space
- Save the code that will be erased by the copy of the hook.
- Copy the hoop over target physical address. In our case it is the IVT handler
for interruption
0x13
sources/rm_kernels/common_16/own_bios.s
.code16
bioshang_start:
cli
// Save the things we need to be unchanged
// %esp : %esp + 0xa
pushl %esp
// %eax : %esp + 0x6
pushl %eax
call _eip
_eip:
popl %eax
// %eip : %esp + 0x2
pushl %eax
// %ds : %esp + 0x0
pushw %ds
xor %ax, %ax
mov %ax, %ds
// Create the state structure
// Save %eax
movl %ss:0x6(%esp), %eax
movl %eax, bios_state + 0x00
movl %ebx, bios_state + 0x04
movl %ecx, bios_state + 0x08
movl %edx, bios_state + 0x0c
// Save %esp
movl %ss:0xa(%esp), %eax
movl %eax, bios_state + 0x10
movl %ebp, bios_state + 0x14
movl %esi, bios_state + 0x18
movl %edi, bios_state + 0x1c
// Save %eip
movl handler_address, %eax
movl %eax, bios_state + 0x20
// Save segments selectors
// Save tr
// str bios_state + 0x24
movw %gs, bios_state + 0x26
movw %fs, bios_state + 0x28
movw %es, bios_state + 0x2a
// Save %ds
movw %ss:0x0(%esp), %ax
movw %ax, bios_state + 0x2c
movw %ss, bios_state + 0x2e
movw %cs, bios_state + 0x30
// Cleanup
pop %ds
pop %eax
pop %eax
pop %esp
// Set up the hook_bios() environment
xor %eax, %eax
mov %ax, %ds
mov %ax, %es
mov %ax, %fs
mov %ax, %gs
mov %ax, %ss
// Set our new stack
movl $0x6000, %esp
movl %esp, %ebp
// Set the parameter core_gpr pointer
movl $bios_state, (%esp)
// Far call to us
ljmp $0x0, $call_hook_bios
bioshang_end:The previous listing is the piece of code overwriting original firmware in order to hook the bios. It is designed to call user handler_address in real mode and restore bios code that has been overwritten installing the hook.
sources/rm_kernels/common_16/own_bios.s
.code16
call_hook_bios:
// Call hook_bios
calll hook_bios
// Restore handler code
// Second argument : handler address
movl handler_address, %eax
pushl %eax
// First argument : function address
pushl $restore_bios
calll run_protected
// ljmp handler_address
// Create the seg:offset addr
movl handler_address, %eax
and $0x0000ffff, %eax
movl handler_address, %ebx
and $0xffff0000, %ebx
shl $0xc, %ebx
or %ebx, %eax
movl %eax, handler_address
// Restore core state
movl bios_state + 0x00, %eax
movl bios_state + 0x04, %ebx
movl bios_state + 0x08, %ecx
movl bios_state + 0x0c, %edx
movl bios_state + 0x10, %esp
movl bios_state + 0x14, %ebp
movl bios_state + 0x18, %esi
movl bios_state + 0x1c, %edi
// Restore segments selectors
// ltr bios_state + 0x24
movw bios_state + 0x26, %gs
movw bios_state + 0x28, %fs
movw bios_state + 0x2a, %es
movw bios_state + 0x2e, %ss
movw bios_state + 0x2c, %ds
sti
// Back again in bios hell
ljmp %cs:*handler_addressLastly the preceding piece of code restores bios code at hook location before
calling user function stored at handler_address. Eventually, when user handler
is returns, we give the hand back to the firmware, restoring its state right at
the hooked address location.
DONE \°/.
Lessons learned
- Hooking the bios is tricky
- Interruption
0x19was hanging in a SMM mode explicit call
outb %al, $0xb2
// god damn it !That result ended the bios adventure on this machine, indeed, the SMM SMI handlers are not reentrant, that is we cannot soft reboot the machine anymore. The only solution is now to manually chain load a bootloader or a kernel, which is time killing. That’s why we decided to migrate Abyme to UEFI firmwares.